


Bluetooth Robot Car Controller
Hobbyprojects.comคำอธิบายของBluetooth Robot Car Controller
Tilt your smartphone to control your own Robot. Here is a simple project to control your Robot/Robo Car using Bluetooth Module HC-05 & 89c2051 Microcontroller with your Android Smartphone device. In this project the accelerometer of your android Smartphone is used to detect the tilt movement angle of Smartphone, just tilt your mobile Forward, Backward, Left and Right to control the direction of Robot.
You can download Circuit & HEX File here http://www.hobbyprojects.com/bluetooth-device-control/
App Instructions:
1. First make sure your HC-05 Bluetooth Module is paired with your mobile. The default password for pairing is "1234" or "0000". Check the manual of Bluetooth module.
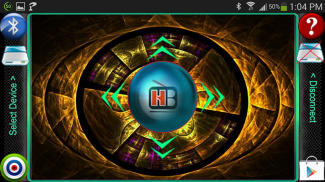
2. Click on "SELECT DEVICE" icon to select paired Bluetooth module.
3. When you tilt mobile "FORWARD" it sends the data "A" to Bluetooth Module connected with the circuit. When Microcontroller detects "A" the Robot / Robot Car moves FORWARD.
4. When you tilt mobile "BACKWARD" it sends the data "B" to Bluetooth Module connected with the circuit. When Microcontroller detects "B" the Robot / Robot Car moves REVERSE.
5. When you tilt mobile "LEFT" it sends the data "C" to Bluetooth Module connected with the circuit. When Microcontroller detects "C" the Robot / Robot Car turns LEFT.
6. When you tilt mobile "RIGHT" it sends the data "D" to Bluetooth Module connected with the circuit. When Microcontroller detects "D" the Robot / Robot Car turns RIGHT.
7. When the mobile phone is not tilted in any direction (screen upward position), it sends the data "E" to Bluetooth Module connected with the circuit. When Microcontroller detects "E" the Robot / Robot Car gets STOPPED. You can also stop the robot by pressing STOP button which is in the center of remote.
เอียงมาร์ทโฟนของคุณเพื่อควบคุมหุ่นยนต์ของคุณเอง นี่เป็นโครงการที่ง่ายต่อการควบคุมหุ่นยนต์ของคุณ / โบรถใช้บลูทู ธ โมดูล HC-05 & 89c2051 ไมโครคอนโทรลเลอร์มาร์ทโฟนกับอุปกรณ์ Android ของคุณ ในโครงการนี้ accelerometer ของหุ่นยนต์มาร์ทโฟนของคุณจะใช้ในการตรวจสอบการเคลื่อนไหวของมุมเอียงของมาร์ทโฟนเพียงแค่เอียงมือถือของคุณไปข้างหน้าไปข้างหลังซ้ายและขวาในการควบคุมทิศทางของหุ่นยนต์
คุณสามารถดาวน์โหลดไฟล์วงจรและ HEX นี่ http://www.hobbyprojects.com/bluetooth-device-control/
คำแนะนำ App:
1. ตรวจสอบให้แน่ใจ HC-05 โมดูลบลูทู ธ ของคุณจะถูกจับคู่กับมือถือของคุณ รหัสผ่านเริ่มต้นสำหรับการจับคู่คือ "1234" หรือ "0000" ตรวจสอบคู่มือของโมดูลบลูทู ธ
2. คลิกที่ "เลือกอุปกรณ์" เพื่อเลือกจับคู่โมดูลบลูทู ธ
3. เมื่อคุณเอียงมือถือ "ไปข้างหน้า" ก็จะส่งข้อมูลที่ระดับ "A" โมดูลบลูทู ธ เชื่อมต่อกับวงจร เมื่อไมโครคอนโทรลเลอร์ตรวจจับ "เป็น" หุ่นยนต์ / หุ่นยนต์รถเคลื่อนที่ไปข้างหน้า
4. เมื่อคุณเอียงมือถือ "ย้อนกลับ" มันจะส่งข้อมูล "B" โมดูลบลูทู ธ เชื่อมต่อกับวงจร เมื่อไมโครคอนโทรลเลอร์ตรวจจับ "B" หุ่นยนต์ / หุ่นยนต์รถเคลื่อน REVERSE
5. เมื่อคุณเอียงมือถือ "ซ้าย" มันจะส่งข้อมูล "C" โมดูลบลูทู ธ เชื่อมต่อกับวงจร เมื่อไมโครคอนโทรลเลอร์ตรวจจับ "C" หุ่นยนต์ / หุ่นยนต์รถหันซ้าย
6. เมื่อคุณเอียง "ขวา" มือถือก็จะส่งข้อมูล "D" โมดูลบลูทู ธ เชื่อมต่อกับวงจร เมื่อไมโครคอนโทรลเลอร์ตรวจจับ "D" หุ่นยนต์ / หุ่นยนต์รถเลี้ยวขวา
7. เมื่อโทรศัพท์มือถือจะไม่เอียงไปในทิศทางใด (หน้าจอตำแหน่งที่สูงขึ้น) ก็จะส่งข้อมูล "E" โมดูลบลูทู ธ เชื่อมต่อกับวงจร เมื่อไมโครคอนโทรลเลอร์ตรวจจับ "E" หุ่นยนต์ / หุ่นยนต์ได้รับการหยุดรถ นอกจากนี้คุณยังสามารถหยุดหุ่นยนต์โดยการกดปุ่ม STOP ซึ่งอยู่ในใจกลางของระยะไกล
Bluetooth Robot Car Controller--เวอร์ชั่น1.0
(07-12-2018)Bluetooth Robot Car Controller - ข้อมูล APK
เวอร์ชั่น APK: 1.0แพ็คเกจ: appinventor.ai_hobbyprojects_com.BluetoothRoboControllerเวอร์ชั่นล่าสุดของBluetooth Robot Car Controller














แอปในประเภทเดียวกัน









